
Что такое компьютерное зрение и какие проблемы оно представляет в мире беспилотных автомобилей?
Беспилотные автомобили — спорная и увлекательная тема, поскольку для достижения высокого уровня безопасности и комфорта они используют передовые системы помощи водителю (ADAS). Хотя полностью беспилотных автомобилей пока не существует, современные технологии позволяют реализовать такие функции, как автоматическое рулевое управление и самостоятельная парковка.
Эти автомобили используют передовые системы компьютерного зрения для анализа окружающей обстановки и принятия разумных решений, полагаясь на различные датчики. В этой статье мы рассмотрим основы компьютерного зрения и то, как оно повышает эффективность автоматизированного вождения, а также проблемы и будущие инновации, ожидаемые в этой области.

Что такое компьютерное зрение?
Компьютерное зрение — это технология, которая позволяет машинам видеть и распознавать объекты в окружающей среде. Это подвид машинного зрения, ориентированный на промышленные приложения визуально-ориентированного обнаружения объектов в автономных машинах, таких как роботы и транспортные средства.
Современное компьютерное зрение использует алгоритмы глубокого обучения на основе искусственного интеллекта, такие как сверточные нейронные сети (CNN), для создания надежных, хорошо обобщенных моделей, которые могут точно идентифицировать объекты в различных условиях. Это позволяет внедрять машинное зрение в различные задачи, требующие повышенной надежности, в производстве, сельском хозяйстве, робототехнике и автомобилестроении.
Как работает компьютерное зрение в беспилотных автомобилях?
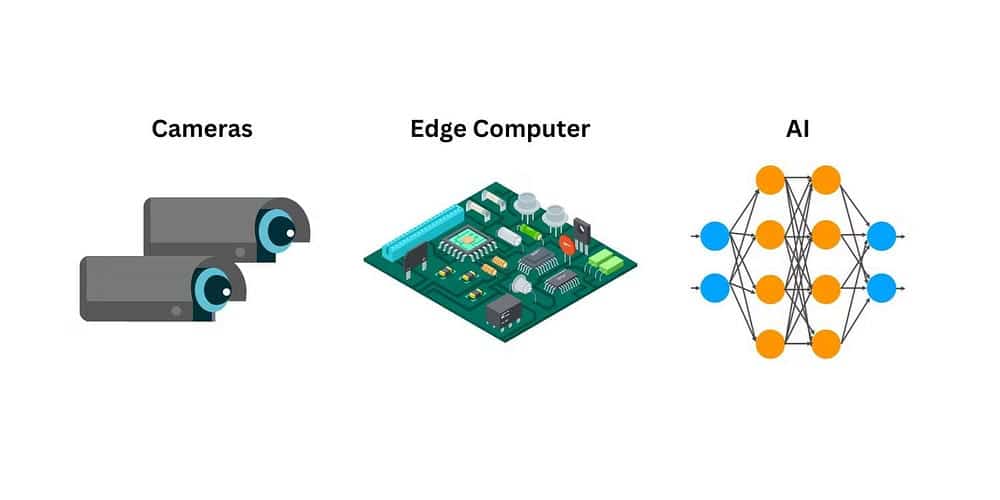
Компьютерное зрение в беспилотных автомобилях можно в целом разделить на три части: система камер, обработка (периферийные вычисления) и искусственный интеллект. Этот набор технологий позволяет автономным автомобилям видеть, учитывать и распознавать различные знаки и препятствия во время движения. Давайте подробно обсудим каждую часть, чтобы понять, как эти технологии объединяются для создания машинного зрения для беспилотного автомобиля.
Система камер
Компьютерное зрение использует системы камер для сбора визуальной информации об окружающей среде. Беспилотные автомобили используют несколько камер, установленных по всему транспортному средству, чтобы собирать как можно больше визуальной информации.
В камерах машинного зрения используются два основных датчика: комплементарный металлооксид-полупроводник (КМОП) и устройства с зарядовой связью (ПЗС). Для беспилотных автомобилей часто отдается предпочтение технологии CMOS из-за ее высокой скорости считывания, мощной электроники и возможностей параллельной обработки, что делает ее самым быстрым датчиком. Такие решения, как различные режимы освещения, цифровое ночное видение и фильтры, могут помочь CMOS-датчику в условиях неидеального освещения.
В беспилотных автомобилях камеры устанавливаются на определенном расстоянии друг от друга, чтобы обеспечить стереоскопическое изображение. Стереоскопическое зрение — это способность комбинировать два или более визуальных входных сигнала, создавая ощущение глубины или трехмерности объектов и окружающей среды. Это, в свою очередь, позволяет автомобилям выполнять триангуляцию и рассчитывать приблизительное расстояние между объектом и автомобилем.
Поскольку у людей два глаза, мы также пользуемся стереоскопическим зрением. Вы можете проверить это видение самостоятельно; Закройте один глаз и возьмите небольшой предмет со стола. Положите руку на край предмета и убедитесь, что его кончик находится на расстоянии не менее двух дюймов. Попробуйте остановиться на несколько секунд и обратите внимание, насколько уверенно вы себя чувствуете в своем приближении. Теперь попробуйте открыть оба глаза и посмотрите, насколько улучшится ваше чувство глубины.
Периферийные вычисления
Периферийные вычисления — это процесс приближения хранилища информации и вычислительной мощности к устройству, генерирующему эти данные, и к пользователям, которые с ними взаимодействуют. Традиционно приложения передавали данные с интеллектуальных устройств, таких как датчики и смартфоны, в центральный центр обработки данных для обработки. Однако беспрецедентная сложность и объем данных превысили возможности сети. Системы периферийных вычислений приближают возможности обработки к пользователям и устройствам, значительно повышая производительность приложений, снижая требования к пропускной способности сети и обеспечивая более быструю аналитику в режиме реального времени.
В то время как система камер в беспилотном автомобиле собирает данные, бортовой компьютер (периферийный процессор) обрабатывает все входящие данные в режиме реального времени, чтобы немедленно обновлять систему о состоянии окружающей среды. Хотя типичные задачи компьютерного зрения могут сэкономить деньги с помощью облачных вычислений, привязка беспилотных автомобилей к облаку сопряжена со слишком большими рисками, даже если это связано с аутсорсингом процесса для удовлетворения требований машинного зрения.
Использование сложного компьютера для обработки входных данных устраняет проблемы с задержками и обеспечивает получение, обработку и передачу данных в режиме реального времени. Современные компьютеры для беспилотных автомобилей используют специализированные компьютеры, в которые интегрированы графические процессоры ИИ, такие как ядра NVIDIA Tensor Core и CUDA.
Алгоритмы искусственного интеллекта
Алгоритмы всегда были важной частью машинного зрения. Алгоритм позволяет компьютеру распознавать все узоры, формы и цвета, предоставляемые системой камер. Использование искусственного интеллекта вместо традиционных алгоритмов компьютерного зрения значительно повышает способность беспилотного автомобиля надежно распознавать объекты, дорожные знаки, дорожную разметку и светофоры. Многие алгоритмы искусственного интеллекта используются для обучения беспилотных автомобилей. Наиболее популярные включают в себя:
- YOLO (Вы смотрите только один раз): алгоритм обнаружения объектов в реальном времени, который идентифицирует и отслеживает объекты в поле зрения автомобиля.
- ПРОСЕЯТЬ (Преобразование функций Scale-Icar'sant): используется для извлечения функций и помогает автомобилю распознавать отличительные ориентиры и объекты в окружении.
- Гистограмма направленных градиентов (HOG): используется для распознавания объектов и фокусируется на извлечении локальных узоров и градиентов из изображений.
- ТекстонБуст: Алгоритм, который помогает идентифицировать объекты путем анализа текстур окружающей среды.
- АдаБуст: AdaBoost, используемый для классификации данных, объединяет несколько слабых классификаторов для принятия надежных решений об объектах и препятствиях на пути транспортного средства.
Важность компьютерного зрения в беспилотных автомобилях
Компьютерное зрение — это основной способ, с помощью которого беспилотный автомобиль воспринимает и понимает окружающую обстановку. Без машинного зрения беспилотные автомобили, скорее всего, будут отнесены к Уровню 1 по шкале автономности транспортных средств и, возможно, никогда не достигнут полной автономности.
Благодаря машинному зрению беспилотные автомобили теперь могут классифицировать объекты, обнаруживать полосы движения и сигналы, распознавать знаки и распознавать движение.
Хотя многие беспилотные автомобили теперь используют различные датчики, такие как ЛИДАР, РАДАР и СОНАРЫ, все они в значительной степени полагаются на компьютерное зрение, чтобы видеть окружающую среду, распознавать объекты и понимать значение дорожных знаков и сигналов светофора. Все эти дополнительные датчики предназначены исключительно для улучшения машинного зрения и повышения безопасности людей, животных и имущества.
Однако машинное зрение может работать автономно без помощи других датчиков, обеспечивая возможности автоматического управления. Фактически, последние беспилотные автомобили Tesla отказались от радиолокационной системы и теперь полагаются исключительно на машинное зрение своей системы автопилота.
Хотя это не обязательно ставит под сомнение полезность других сенсорных технологий, это демонстрирует важность и мощь компьютерного зрения в беспилотных автомобилях.
Общие вопросы
В1. Что такое технология компьютерного зрения? В беспилотных автомобилях?
Технология компьютерного зрения — это аппаратная и программная система, которая анализирует и интерпретирует изображения и видео, позволяя беспилотным автомобилям распознавать окружающую обстановку и принимать решения во время вождения.
В2. Как работает технология компьютерного зрения В машинах?
Автомобиль оснащен множеством камер и датчиков, которые фиксируют изображения и видео из окружающей среды. Эти данные обрабатываются с помощью современного программного обеспечения для анализа изображений и распознавания различных объектов и ориентиров на дороге.
В3. Каково значение технологии компьютерного зрения? В беспилотном вождении?
Технология компьютерного зрения имеет решающее значение для автономного вождения, позволяя распознавать дорожные знаки, другие транспортные средства и препятствия на дороге. Эта оперативная информация является основой для автоматизированного принятия решений, включая управление транспортным средством и предотвращение аварий.
Вопрос 4. С какими проблемами сталкиваются технологии машинного зрения?
Проблемы, с которыми сталкиваются технологии компьютерного зрения, включают такие факторы, как неблагоприятные погодные условия, такие как туман и дождь, трудности с распознаванием объектов в полной темноте, а также защита данных и конфиденциальность.
Вопрос 5. Каковы ожидаемые дальнейшие разработки в этой области?
Ожидается, что технология компьютерного зрения продолжит развиваться, будут появляться новые возможности применения искусственного интеллекта и усовершенствованные возможности распознавания образов и датчиков. Также возможно расширить применение этой технологии и на другие области, помимо автомобилестроения.
Будущее машинного зрения в беспилотных автомобилях
Компьютерное зрение — основа беспилотных автомобилей. Благодаря машинному зрению автомобили могут видеть и воспринимать окружающую среду так же, как люди. Несмотря на то, что проблемы остаются, преимущества компьютерного зрения с точки зрения безопасности и навигации нельзя недооценивать. Что касается будущего беспилотных автомобилей, то любые дальнейшие достижения в области искусственного интеллекта, периферийных вычислений и/или технологий камер сделают беспилотные автомобили более эффективными, что, вероятно, выведет их на более высокий уровень автоматизации.
Комментарии закрыты.